< Un systŤme multi-t‚ches simple | TutoOS | Booter avec Grub >
Un noyau multi-t‚ches avec des appels systŤmes prťemptibles
- Un scheduler qui tient compte du contexte d'exťcution
- Utiliser les TrapGate pour rendre les appels systŤmes interruptibles
Sources
Le package contenant les sources est tťlťchargeable ici : kernel_MultiTask_Preemptible.tgz
Pour naviguer dans l'arborescence : MultiTask_Preemptible
Un scheduler qui tient compte du contexte d'exťcution
Une pile noyau par t‚che : pourquoi ?
Quand une t‚che fait un appel systŤme, la pile noyau est automatiquement utilisťe par le processeur. Les routines de traitement de cet appel utilisent alors cette pile pour stocker des donnťes, passer des paramŤtres ŗ des fonctions, etc. Une fois que l'appel systŤme est terminť, les donnťes temporaires sont dťpilťes et la pile noyau retourne ŗ son ťtat initial, telle qu'elle ťtait avant l'appel.
Si l'on autorise les interruptions et la commutation de t‚ches pendant un appel systŤme, voilŗ ce qui risque de se passer :
- Par exemple, la t‚che A fait un appel systŤme et utilise la pile noyau pour traiter cet appel.
- L'ordonanceur est activť alors que l'appel n'est pas terminť et il donne la main ŗ la t‚che B.
- La t‚che B fait elle aussi un appel systŤme, et elle utilise donc elle aussi la pile du noyau qui contenait dťja les donnťes en cours pour le traitement de l'appel de la t‚che A. A ce moment, la pile noyau contient des donnťes de A et des donnťes de B.
- L'ordonnanceur active de nouveau la t‚che A et celle-ci reprend sans se douter que la pile a ťtť modifiťe. Comme elle va utiliser la pile en supposant qu'elle est dans l'ťtat oý elle l'avait laissť, elle va corrompre les donnťes de la t‚che B.
- La t‚che B reprend mais la pile est corrompue... et c'est le drame !
Pour ťviter ce scťnario catastrophe, il existe une solution trŤs simple : il suffit que chaque t‚che ait sa propre pile noyau !
Une pile noyau par t‚che : comment
La fonction load_task() est modifiťe afin d'associer ŗ chaque t‚che sa propre pile noyau :
process.c.
#include "mm.h"
#define __PLIST__
#include "process.h"
void load_task(u32 * code_phys_addr, u32 * fn, unsigned int code_size)
{
u32 page_base, pages, kstack_base;
u32 *pd;
int i;
/* Copie du code a l'adresse specifiee */
memcpy((char *) code_phys_addr, (char *) fn, code_size);
/* Mise a jour du bitmap */
page_base = (u32) PAGE(code_phys_addr);
if (code_size % PAGESIZE)
pages = code_size / PAGESIZE + 1;
else
pages = code_size / PAGESIZE;
for (i = 0; i < pages; i++)
set_page_frame_used(page_base + i);
/* Creation du repertoire et des tables de pages */
pd = pd_create(code_phys_addr, code_size);
kstack_base = (u32) get_page_frame();
if (kstack_base > 0x400000) {
printk("not enough memory to create a kernel stack\n");
return;
}
/* Initialisation des registres */
p_list[n_proc].pid = n_proc;
p_list[n_proc].regs.ss = 0x33;
p_list[n_proc].regs.esp = 0x40001000;
p_list[n_proc].regs.eflags = 0x0;
p_list[n_proc].regs.cs = 0x23;
p_list[n_proc].regs.eip = 0x40000000;
p_list[n_proc].regs.ds = 0x2B;
p_list[n_proc].regs.es = 0x2B;
p_list[n_proc].regs.fs = 0x2B;
p_list[n_proc].regs.gs = 0x2B;
p_list[n_proc].regs.cr3 = (u32) pd;
p_list[n_proc].kstack.ss0 = 0x18;
p_list[n_proc].kstack.esp0 = kstack_base + PAGESIZE;
p_list[n_proc].regs.eax = 0;
p_list[n_proc].regs.ecx = 0;
p_list[n_proc].regs.edx = 0;
p_list[n_proc].regs.ebx = 0;
p_list[n_proc].regs.ebp = 0;
p_list[n_proc].regs.esi = 0;
p_list[n_proc].regs.edi = 0;
n_proc++;
}
Le code ci-dessous alloue ŗ une t‚che sa propre pile noyau. Par simplicitť, une pile occupe une page :
/* ... */
p_list[n_proc].kstack.ss0 = 0x18;
p_list[n_proc].kstack.esp0 = kstack_base + PAGESIZE;
Suite ŗ une interruption, le processeur empile automatiquement des donnťes sur la pile noyau de la t‚che interrompue, sans compter celles ajoutťes par les diffťrentes routines du noyau. Il est crucial qu'ŗ l'issue d'une interruption, la pile noyau utilisťe soit remise dans le mÍme ťtat qu'avant l'interruption.
L'ordonnanceur
La complexitť de l'ordonnanceur provient essentiellement des difficultťs induites par la gestion des diffťrentes piles noyau et utilisateur.
Le code de l'ordonnanceur est rťparti dans deux fichiers :
- schedule.c contient la partie prťparatoire au changement de contexte
#include "gdt.h"
#include "process.h"
void switch_to_task(int n, int mode)
{
u32 kesp, eflags;
u16 kss, ss, cs;
current = &p_list[n];
/* charger tss */
default_tss.ss0 = current->kstack.ss0;
default_tss.esp0 = current->kstack.esp0;
/*
* Empile les registres ss, esp, eflags, cs et eip necessaires a la
* commutation. Ensuite, la fonction do_switch() restaure les
* registres, la table de page du nouveau processus courant et commute
* avec l'instruction iret.
*/
ss = current->regs.ss;
cs = current->regs.cs;
eflags = (current->regs.eflags | 0x200) & 0xFFFFBFFF;
if (mode == USERMODE) {
kss = current->kstack.ss0;
kesp = current->kstack.esp0;
} else { /*KERNELMODE */
kss = current->regs.ss;
kesp = current->regs.esp;
}
asm(" mov %0, %%ss; \
mov %1, %%esp; \
cmp %[KMODE], %[mode]; \
je next; \
push %2; \
push %3; \
next: \
push %4; \
push %5; \
push %6; \
push %7; \
ljmp $0x08, $do_switch"
:: \
"m"(kss), \
"m"(kesp), \
"m"(ss), \
"m"(current->regs.esp), \
"m"(eflags), \
"m"(cs), \
"m"(current->regs.eip), \
"m"(current), \
[KMODE] "i"(KERNELMODE), \
[mode] "g"(mode)
);
}
void schedule(void)
{
struct process *p;
u32 *stack_ptr;
/* Stocke dans stack_ptr le pointeur vers les registres sauvegardes */
asm("mov (%%ebp), %%eax; mov %%eax, %0": "=m"(stack_ptr) : );
/* Si il n'y a pas de processus charge et qu'au moins un est pret, on le charge */
if (current == 0 && n_proc) {
switch_to_task(0, USERMODE);
}
/*
* Si il y a un seul processus (qu'on laisse tourner) ou aucun
* processus, on retourne directement.
*/
else if (n_proc <= 1) {
return;
}
/* Si il y a au moins deux processus, on commute vers le suivant */
else if (n_proc > 1) {
/* Sauver les registres du processus courant */
current->regs.eflags = stack_ptr[16];
current->regs.cs = stack_ptr[15];
current->regs.eip = stack_ptr[14];
current->regs.eax = stack_ptr[13];
current->regs.ecx = stack_ptr[12];
current->regs.edx = stack_ptr[11];
current->regs.ebx = stack_ptr[10];
current->regs.ebp = stack_ptr[8];
current->regs.esi = stack_ptr[7];
current->regs.edi = stack_ptr[6];
current->regs.ds = stack_ptr[5];
current->regs.es = stack_ptr[4];
current->regs.fs = stack_ptr[3];
current->regs.gs = stack_ptr[2];
if (current->regs.cs != 0x08) {
current->regs.esp = stack_ptr[17];
current->regs.ss = stack_ptr[18];
} else { /* Interruption pendant un appel systeme */
current->regs.esp = stack_ptr[9] + 12;
current->regs.ss = default_tss.ss0;
}
/* Sauver le tss */
current->kstack.ss0 = default_tss.ss0;
current->kstack.esp0 = default_tss.esp0;
/* Choix du nouveau processus (un simple roundrobin) */
if (n_proc > current->pid + 1)
p = &p_list[current->pid + 1];
else
p = &p_list[0];
/* Commutation */
if (p->regs.cs != 0x08)
switch_to_task(p->pid, USERMODE);
else
switch_to_task(p->pid, KERNELMODE);
}
}
- sched.asm contient le code qui effectue effectivement le changement de contexte
do_switch:
; recuper l'adresse de *current
mov esi, [esp]
pop eax ; depile @current
; prepare les registres
push dword [esi+4] ; eax
push dword [esi+8] ; ecx
push dword [esi+12] ; edx
push dword [esi+16] ; ebx
push dword [esi+24] ; ebp
push dword [esi+28] ; esi
push dword [esi+32] ; edi
push dword [esi+48] ; ds
push dword [esi+50] ; es
push dword [esi+52] ; fs
push dword [esi+54] ; gs
; enleve le mask du PIC
mov al, 0x20
out 0x20, al
; charge table des pages
mov eax, [esi+56]
mov cr3, eax
; charge les registres
pop gs
pop fs
pop es
pop ds
pop edi
pop esi
pop ebp
pop ebx
pop edx
pop ecx
pop eax
; retourne
iret
Le design de l'ordonnanceur est plus compliquť car :
- Il doit prendre en compte le contexte de la t‚che lors de son interruption.
- Chaque t‚che a sa propre pile noyau.
- L'ordonnanceur change de pile noyau pendant la commutation.
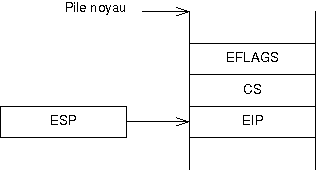
- La pile noyau ne contient pas le mÍme nombre de registres empilťs selon que la t‚che interrompue ťtait en mode utilisateur ou en mode noyau. L'interruption d'une t‚che en mode utilisateur provoque automatiquement l'empilement des registres ss, esp, eflags, cs et eip. Quand l'interruption survient alors que la t‚che est en mode noyau, les seuls registres empilťs sont : eflags, cs et eip.
Schťmas de la pile noyau aprŤs l'interruption d'une t‚che en mode utilisateur :

Schťmas de la pile noyau aprŤs l'interruption d'une t‚che en mode noyau :
Toutes les contraintes supportťes par l'ordonnanceur peuvent se rťsumer ŗ :
- sauvegarder les registres de la t‚che interrompue
- remettre la pile noyaux dans l'ťtat prťcťdent l'interruption avant de quitter celle-ci
Le schťma suivant reprťsente la pile noyau lors de l'appel ŗ la fonction schedule() dans le cas oý le processeur ťtait en mode utilisateur lors de l'interruption : pile
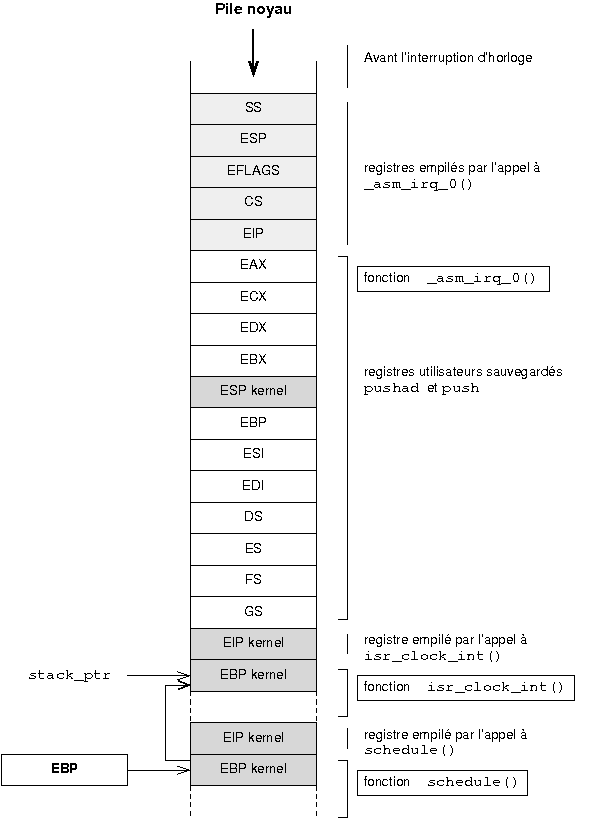
Attention ! Cette reprťsentation de la pile illustre le cas oý le processeur ťtait en mode utilisateur lors de l'interruption.
Dans le cas oý le processeur ťtait en mode noyau au moment de l'interruption, le schťma est trŤs sensiblement diffťrent car les registres ss et esp n'ont pas ťtť empilťs.
Notre but est de sauvegarder l'ťtat de l'ensemble des registres de la t‚che interrompue, ce qui ne pose aucun problŤme pour l'ensemble d'entre eux (eax, ebx, etc.). La seule difficultť est de retrouver les valeurs de ss et de esp juste avant l'interruption d'horloge car si l'interruption est survenue pendant un appel systŤme, on ne peut procťder de la mÍme faÁon pour retrouver ces valeurs car elles n'ont pas ťtť empilťes :
current->regs.esp = stack_ptr[17];
current->regs.ss = stack_ptr[18];
}
else { /* interruption pendant un appel systeme */
current->regs.esp = stack_ptr[9] + 12; /* equivalent a : &stack_ptr[17] */
current->regs.ss = default_tss.ss0;
}
- Le premier cas est celui de l'interruption d'une t‚che en mode utilisateur. L'appel systŤme a sauvegardť tous les registres, dont ss et esp, sur la pile noyau de la t‚che. C'est un cas assez simple dťjŗ vu au chapitre prťcťdent.
- Le deuxiŤme cas concerne l'interruption d'une t‚che en mode noyau. Le processeur utilisait la mÍme pile avant l'interruption et esp pointait juste au sommet des registres empilťs par l'interruption. Pour retrouver cette valeur, plusieurs calculs sont possibles :
stack_ptr[9]contient la valeur du pointeur de pile juste aprŤs l'interruption (et avant l'appel ŗpushet ŗpushad). Avant l'interruption, esp pointait sur la mÍme pile mais juste avant les trois registres eflags, cs et eip empilťs par l'interruption. Nous avons donc : 3 registres * 4 octets par registre = 12.stack_ptr[9] + 12pointe donc au sommet de la pile.- Le sommet de la pile est situť 17 registres au-dessus du pointeur
stack_ptr, on pourrait donc utiliser l'un des deux calculs suivants :stack_ptr + 17 * 4ou&stack_ptr[17].
AprŤs avoir sťlectionnť une nouvelle t‚che, pointťe par *p, l'ordonnanceur teste si cette nouvelle t‚che ŗ activer avait ťtť interrompue en mode utilisateur ou en mode noyau. La fonction switch_to_task() est appelť avec le pid de la t‚che ŗ activer et le mode dans lequel il faut l'activer :
if (p->regs.cs != 0x08)
switch_to_task(p->pid, USERMODE);
else
switch_to_task(p->pid, KERNELMODE);
La fonction switch_to_task()
La fonction switch_to_task() prťpare la commutation :
- elle change de pile noyau et passe sur la pile de la nouvelle t‚che
- elle empile les registres nťcessaire ŗ l'instruction
iret - elle passe la main ŗ la fonction
do_switch()qui charge les registres et effectue la commutation
Les variables current->regs.ss, current->regs.cs et current->regs.eflags ne peuvent Ítre directement utilisťes dans la fonction asm(). Ces trois affectations initialisent des variables qui pourront elles Ítre passťes en paramŤtre ŗ la fonction assembleur :
cs = current->regs.cs;
eflags = (current->regs.eflags | 0x200) & 0xFFFFBFFF;
Ce code rťcupŤre les paramŤtres de la pile noyau pour la nouvelle t‚che. Si celle-ci est en mode utilisateur, on va utiliser une pile noyau "propre". Si en revanche elle est en mode noyau, il suffit de reprendre les valeurs ss et esp sauvegardťes lors du changement de contexte :
kss = current->kstack.ss0;
kesp = current->kstack.esp0;
}
else { /*KERNELMODE */
kss = current->regs.ss;
kesp = current->regs.esp;
}
Cette fonction effectue un gros travail :
- les deux premiŤres instruction basculent sur la nouvelle pile noyau
- si la t‚che est en mode utilisateur, elle empile les valeurs sauvegardťes des registres ss et esp
- elle empile les valeurs sauvegardťes des registres eflags, cs et eip
- elle passe la main ŗ la fonction
do_switch()qui charge les registres avec les valeurs sauvegardťes et effectue la commutation aveciret
mov %1, %%esp; \
cmp %[KMODE], %[mode]; \
je next; \
push %2; \
push %3; \
next: \
push %4; \
push %5; \
push %6; \
push %7; \
ljmp $0x08, $do_switch" \
:: \
"m" (kss), \
"m" (kesp), \
"m" (ss), \
"m" (current->regs.esp), \
"m" (eflags), \
"m" (cs), \
"m" (current->regs.eip), \
"m" (current), \
[KMODE] "i" (KERNELMODE), \
[mode] "g" (mode)
);
Utiliser les TrapGate pour rendre les appels systŤmes interruptibles
Les appels systŤmes sont rendus interruptibles :
Pour tester le fait qu'ils sont bien interruptibles, une temporisation est ajoutťe pour les rendre plus lent : syscalls.c.
#include "lib.h"
#include "io.h"
void do_syscalls(int sys_num)
{
char *u_str;
int i;
if (sys_num == 1) {
asm("mov %%ebx, %0": "=m"(u_str) :);
for (i = 0; i < 100000; i++); /* temporisation */
cli;
printk(u_str);
sti;
} else {
printk("unknown syscall %d\n", sys_num);
}
return;
}
L'utilisation de la fonction cli peut cependant Ítre requis car il n'est pas souhaitable qu'un appel systŤme soit interrompu ŗ certains moments critiques de son exťcution. Notament ici, pour avoir un affichage cohťrent, j'ai prťfťrť dťsactiver les interruptions le temps de l'affichage de la chaÓne.
< Un systŤme multi-t‚ches simple | TutoOS | Booter avec Grub >