< Créer et exécuter une tâche | TutoOS | Gérer la mémoire - utiliser la pagination >
Un noyau mono-tâche qui implémente des appels systčmes
Sources
Le package contenant les sources est téléchargeable ici : kernel_MonoTask_Syscall.tgz
Pour naviguer dans l'arborescence : MonoTask_Syscall
Des appels systčme pour accéder aux services du noyau
Pourquoi ?
Le mécanisme de segmentation empčche le code utilisateur d'accéder librement aux périphériques ou au noyau. Pour accéder ŕ ces ressources, par exemple pour écrire dans la mémoire vidéo ou sur disque, le code utilisateur utilise des services implémentés au niveau du noyau : les appels systčmes. Le noyau illustré ici implémente un appel systčme permettant d'afficher un message ŕ l'écran.
Appeler une routine privilégiée ŕ l'aide d'une interruption logicielle
Nous avons vu aux chapitres précédent que des interruptions peuvent ętres déclenchées par les périphériques ou directement par le processeur en cas d'exception. Un troisičme type d'interruption existe, ce sont les interruptions logicielles, déclenchées volontairement par le code noyau ou utilisateur ŕ l'aide de l'instruction int. Ce sont ces interruptions qui vont nous servir pour implémenter les appels systčme.
Une interruption logicielle qui utilise un Trap Gate
Nous avons déjŕ détaillé la façon dont fonctionnent les interruptions matérielles. Les interruptions logicielles fonctionnent exactement de la męme façon ŕ deux différences prčt :
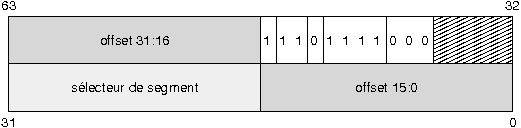
- nous allons utiliser un descripteur de Trap Gate au lieu d'un descripteur de type Interrupt Gate. La seule différence entre les deux est qu'un Trap Gate ne désactive pas les interruptions.
- nous allons initialiser différement le champ DPL du descripteur
Descripteur systčme de type Trap Gate
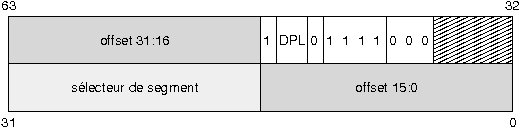
Le DPL (Descriptor Privilege Level) est utilisé pour contrôler l'accčs au segment selon le niveau de privilčge du code appelant. La valeur 3 indique que toutes les applications, męme les moins privilégiées, peuvent utiliser le trap gate tandis que la valeur 0 restreint son utilisation au seul code noyau. Comme nous voulons que le trap gate soit utilisable par les applications utilisateur, il faut un DPL de 3 :
Il est initialisé ŕ l'aide du code suivant :
Grâce ŕ ce descripteur, suite ŕ une interruption de type int 0x30, le processeur va exécuter la routine de service _asm_syscalls.
Comment passer des paramčtres ŕ l'appel systčme ?
Nous avons vu ci-dessus qu'un appel systčme se fait trčs simplement grâce aux interruptions logicielles. Le noyau peut ainsi fournir des services aux applications utilisateur, mais comment passer des paramčtres ŕ ces services ? Deux solutions sont trčs courantes :
- passer les paramčtres via la pile utilisateur
- passer les paramčtres en les plaçant dans les registres, la plus simple ŕ implémenter
Nous allons voir comment implémenter la deuxičme solution. Elle a le mérite d'ętre simple, mais le nombre réduit de registres sur les architectures i386 limite le nombre de paramčtres que l'on peut passer par cette méthode (eax, ebx, ecx, edx, edi et esi).
Dans notre implémentation d'un appel systčme qui affiche une chaîne de caractčre ŕ l'écran, les registres utilisés sont :
eax, qui contient le numéro d'appel systčmeebx, qui contient l'adresse de la chaîne de caractčres ŕ afficher
Le code qui réalise l'appel :
La routine d'interruption (1)
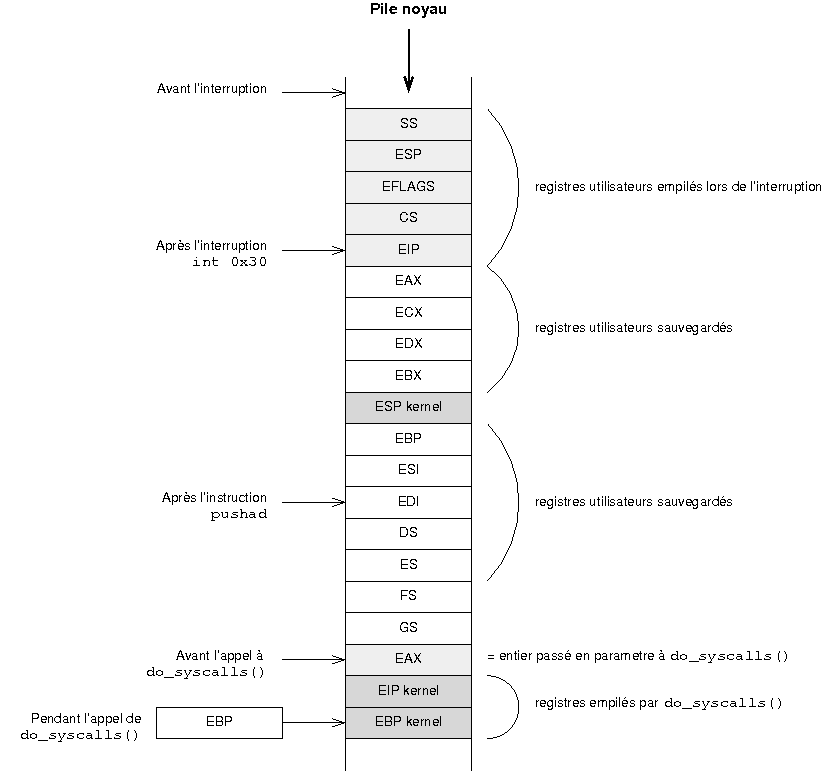
La routine de traitement de l'interruption est semblable ŕ celles déjŕ vu pour les interruptions matérielles. Elle commence par sauvegarder les registres utilisateur et par initialiser le registre DS pour qu'il pointe sur le segment de données du noyau. Ensuite, elle pousse sur la pile le registre eax, qui contient le numéro de l'appel systčme, pour le transmettre ŕ la fonction do_syscalls() appelée juste aprčs :
SAVE_REGS
push eax ; transmission du numero d'appel
call do_syscalls
pop eax
RESTORE_REGS
iret
La routine d'interruption (2)
La fonction do_syscalls() effectue le vrai travail de gestion de l'interruption. Le principe de cette fonction est simple :
- déterminer l'appel systčme grâce au numéro passé en argument ŕ la fonction
- récupérer les paramčtres de l'appel, placés dans les registres et poussés sur la pile
#include "gdt.h"
#include "screen.h"
void do_syscalls(int sys_num)
{
u16 ds_select;
u32 ds_base;
struct gdtdesc *ds;
uchar *message;
if (sys_num == 1) {
asm(" mov 44(%%ebp), %%eax \n \
mov %%eax, %0 \n \
mov 24(%%ebp), %%ax \n \
mov %%ax, %1" : "=m"(message), "=m"(ds_select) : );
ds = (struct gdtdesc *) (GDTBASE + (ds_select & 0xF8));
ds_base = ds->base0_15 + (ds->base16_23 << 16) + (ds->base24_31 << 24);
print((char*) (ds_base + message));
} else {
print("syscall\n");
}
return;
}
Que fait exactement cette fonction ?
La ligne ci-dessus permet de récupérer le numéro d'appel systčme passé en paramčtre ŕ la fonction (par le biais de l'instruction push eax). Dans notre implémentation, il n'y a pour le moment qu'un appel systčme, mais un noyau en a généralement plusieurs dizaines ou centaines.
Le bloc traite l'appel systčme numéro 1.
mov %%eax, %0 \n \
mov 24(%%ebp), %%ax \n \
mov %%ax, %1" : "=m" (message), "=m" (ds_select) : );
Dans notre implémentation, les paramčtres sont passés ŕ l'appel systčme ŕ l'aide des registres. Nous savons que l'adresse de la chaîne ŕ afficher a été placée par le programme utilisateur dans le registre EBX. Mais ŕ cet endroit de la fonction do_syscalls, rien ne nous garanti que ce registre n'ait pas été modifié. Heureusement, ce registre a été sauvegardé sur la pile noyau, ce qui permet de récupérer sa valeur.
Une fois récupérée la valeur de EBX, on devrait pouvoir afficher la chaîne sans problčme ? Et bien non !
La chaîne de caractčres contenant le message ŕ afficher n'est toujours pas accessible car EBX
contient seulement un déplacement et il faut récupérer l'adresse de la base du segment de données utilisateur pour connaître l'adresse physique exacte oů se situe la chaîne. On obtient cette adresse ŕ partir de la valeur sauvegardée du registre DS qui pointe sur le bon descripteur de segment dans la GDT.
Note : l'annexe sur les Stack Frame explique dans le détail comment récupérer des paramčtres sur la pile.
ds_base = ds->base0_15 + (ds->base16_23 << 16) + (ds->base24_31 << 24);
A partir de la valeur ds_select, on retrouve l'emplacement du descripteur de segment de données dans la GDT. La valeur du registre DS n'est pas utilisée telle qu'elle car le champ RPL a été positionné. Pour obtenir l'offset du descripteur dans la GDT, il faut appliquer le masque 0xF8. L'adresse de base est ensuite reconstituée ŕ partir de ses différents champs.
Enfin, la fonction print() est appelée avec l'adresse physique de la chaîne ŕ afficher.
print("syscall\n");
}
return;
Pour les autres appels systčmes, on affiche seulement un petit message ŕ l'écran et la fonction se termine.
Charger une tâche
Le code applicatif est assez simple et affiche simplement un message avant de boucler indéfiniment.
Le modčle d'organisation de la mémoire utilisé est décrit au chapitre précédent. Il spécifie que le code applicatif, défini dans par la fonction task1(), doit ętre en 0x30000. Comme ce code fait au maximum 100 octets, le noyau le recopie directement ŕ l'adresse voulue :
memcpy((char*) 0x30000, (char*) &task1, 100); /* copie de 100 instructions */
Les données utilisateur, ici le message ŕ afficher, doivent ętre stockées dans le segment entre 0x30000 et 0x31000. En principe, nous aimerions avoir une fonction utilisateur ressemblant ŕ ceci :
{
char *msg = "hello world !\n";
Hélas, ŕ ce stade du développement de notre noyau, ça n'est pas possible car la fonction task1() fait partie du noyau et n'a pas été compilée pour tenir compte du fait qu'elle serait relogée ailleurs.
Nous sommes donc obligés de ruser un peu pour stocker la chaîne de caractčre quelque part entre 0x30000 et 0x31000. Arbitrairement (enfin pas tout ŕ fait, nous avons pris soin de prendre une valeur qui n'écrase pas le code de la fonction), la chaîne est placée en 0x30100 :
{
char *msg = (char*) 0x100; /* le message sera stocké en 0x30100 */
msg[0] = 't';
msg[1] = 'a';
msg[2] = 's';
msg[3] = 'k';
msg[4] = '1';
msg[5] = '\n';
msg[6] = 0;
asm("mov %0, %%ebx; mov $0x01, %%eax; int $0x30" :: "m" (msg));
while(1);
return; /* never goes there */
}
Une fois la chaîne placée en 0x30100, le code peut exécuter l'appel systčme permettant de l'afficher ŕ l'écran :
Exécuter le noyau
La tâche en mode utilisateur fait un appel systčme au service d'affichage, en mode noyau, qui écrit dans la mémoire vidéo :

< Créer et exécuter une tâche | TutoOS | Gérer la mémoire - utiliser la pagination >