< Gérer les interruptions du clavier | TutoOS | Les appels systčmes >
Un noyau qui exécute une tâche utilisateur
- Mode noyau et mode utilisateur
- Définir des segments de mémoire distincts
- Copier le code exécutable en RAM
- Créer et initialiser un TSS
- Exécuter une tâche
- Sauvegarder le contexte d'une tâche
- Compiler et exécuter le noyau
Sources
Le package contenant les sources est téléchargeable ici : kernel_MonoTask.tgz
Pour naviguer dans l'arborescence : MonoTask
Mode noyau et mode utilisateur
Pourquoi ?
Nous avons vu comment créer un programme qui peut ŕ tout moment accčder ŕ n'importe quel endroit de la mémoire et exécuter n'importe quelle instruction. Cette liberté a un prix : le risque de corrompre des données ou d'exécuter une instruction indésirable. Si ce risque est un mal nécessaire pour le noyau qui doit nécessairement pouvoir tout faire, il n'est pas souhaitable que le code d'un utilisateur bénéficie des męmes permissions. Ce dernier ne doit pas pouvoir accéder aux données des autres utilisateurs ou corrompe l'ensemble du systčme (intentionnellement ou non).
Sous Unix, on distingue deux types de mode d'exécution d'un programme : le mode noyau (ou privilégié ou encore superviseur) et le mode utilisateur :
- le code en mode noyau a un accčs total ŕ la machine (mémoire, instructions, périphériques)
- le code en mode utilisateur n'a qu'un accčs limité ŕ la mémoire et il ne peut pas exécuter certaines instructions dangereuses.
Par exemple, sur un systčme de type Unix, un programme utilisateur peut seulement accéder ŕ ses propres données et il ne peut pas, par exemple, rebooter la machine.
Comment ?
La famille de processeur i386 offre plusieurs méthodes pour exécuter du code en mode utilisateur. La méthode décrite ici est celle du software task switching. Pour commuter une tâche par cette méthode, le noyau doit :
- définir les segments de mémoire utilisables par la tâche
- copier la tâche (le code exécutable et les données) en mémoire
- créer et initialiser la structure TSS
- empiler certaines valeurs clef permettant la commutation sur la pile
- commuter grâce ŕ l'instruction
iret
Celŕ peut sembler un peut compliquer, mais pourtant il n'en est rien. Ces différents points sont expliqués en détail ci-dessous.
Définir des segments de mémoire distincts
Dans les chapitres précédents, nous avons vu comment utiliser le mécanisme de segmentation pour adresser l'ensemble de la mémoire en mode protégé. Le mécanisme de segmentation permet de restreindre la mémoire accessible par une tâche utilisateur en lui associant des descripteurs de segment dont les champs base et limite définissent une plage de mémoire restreinte. La sécurisation est également étendue par l'utilisation du champ DPL des descripteurs qui permet d'empęcher l'utilisation de certaines instructions critiques.
Dans notre implémentation, nous avons une seule tâche en mode utilisateur dont l'espace accessible est restreint ŕ :
- un segment de code de 4k
- un segment de données de 4k confondu avec le segment de code
- un segment de pile de 4k
Le noyau, quant ŕ lui, peut adresser l'ensemble de la mémoire (celŕ n'est pas clairement représenté dans le schéma ci-dessous) :

Les descripteurs de segment associés ŕ la tâche utilisateur sont créés et initialisés de la façon suivante :
init_gdt_desc(0x30000, 0x0, 0xFF, 0x0D, &kgdt[4]); /* ucode */
init_gdt_desc(0x30000, 0x0, 0xF3, 0x0D, &kgdt[5]); /* udata */
init_gdt_desc(0x0, 0x20, 0xF7, 0x0D, &kgdt[6]); /* ustack */
Copier le code exécutable en RAM
Pour cette premičre implémentation, la tâche utilisateur est une fonction trčs simple qui boucle sur elle męme :
{
while(1);
return; /* never go there */
}
De façon arbitraire, il a été décidé que le code de la tâche doit résider en 0x30000. Pour le moment, nous n'avons pas vraiment de moyen de créer un exécutable et de le charger en mémoire via un chargeur ELF ou quelque chose de similaire. Nous allons donc tout simplement créer une fonction dans le noyau et copier le code de cette fonction ŕ l'endroit voulu. Comme c'est une toute petite fonction qui occupe au maximum 100 octets, elle est chargée en mémoire par le code suivant :
memcpy((char*) 0x30000, &task1, 100); /* copie de 100 instructions */
Créer et initialiser un TSS
Le TSS (Task State Segment) est une structure qui permet de garder en mémoire l'état des registres lors d'une commutation de tâche ou d'une interruption. Dans notre cas, le TSS va uniquement servir ŕ garder en mémoire les indications relatives ŕ la pile du noyau (ŕ savoir les valeurs des registres SS et ESP). Cette structure, utilisée de façon assez diverse selon l'implémentation de la commutation de tâche, peut résider n'importe oů en mémoire. Elle est localisable grâce ŕ un descripteur particulier dans la GDT : le descripteur de TSS. Un sélecteur de segment spécifique, le Task Register (TR), permet de pointer sur ce descripteur :

Descripteur de TSS

Structure d'un TSS
La structure du TSS : schéma
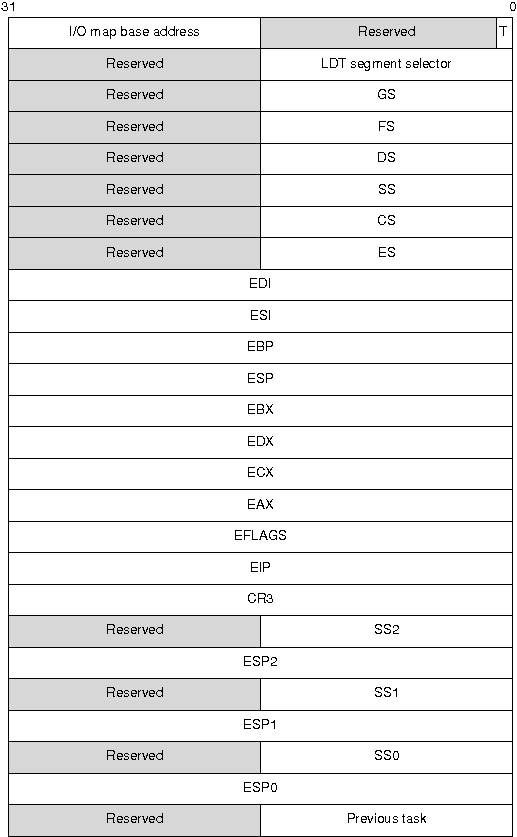
Initialiser le TSS
L'initialisation du TSS se fait en plusieurs étapes :
u16 previous_task, __previous_task_unused;
u32 esp0;
u16 ss0, __ss0_unused;
u32 esp1;
u16 ss1, __ss1_unused;
u32 esp2;
u16 ss2, __ss2_unused;
u32 cr3;
u32 eip, eflags, eax, ecx, edx, ebx, esp, ebp, esi, edi;
u16 es, __es_unused;
u16 cs, __cs_unused;
u16 ss, __ss_unused;
u16 ds, __ds_unused;
u16 fs, __fs_unused;
u16 gs, __gs_unused;
u16 ldt_selector, __ldt_sel_unused;
u16 debug_flag, io_map;
} __attribute__ ((packed));
default_tss.debug_flag = 0x00;
default_tss.io_map = 0x00;
default_tss.esp0 = 0x20000;
default_tss.ss0 = 0x18;
ltr
ltr %ax");
ss0 et esp0 du TSS) avec les valeurs courantes se fait trčs simplement :
movl %%esp, %1" : "=m" (default_tss.ss0), "=m" (default_tss.esp0) : );
Exécuter une tâche
Intel(c) propose plusieurs mécanismes pour effectuer une commutation de tâche. La commutation hardware est "presque" entičrement gérée par le processeur. Elle est cependant rarement utilisée car :
- sa mise en oeuvre est paradoxalement plutôt difficile
- le nombre de processus est limité par la taille de la GDT
La commutation software, ŕ l'inverse, est comparativement simple ŕ mettre en oeuvre et n'a pas de limitation concernant le nombre de processus possible. Pour commuter une tâche de façon soft, il suffit de :
- empiler certaines valeurs clef sur la pile
- commuter grâce ŕ l'instruction
iret
Simuler un retour d'interruption pour changer de tâche
L'instruction iret sert normalement ŕ retourner d'une interruption. Dans le cas présent, une petite astuce ŕ la base de notre implémentation va se servir de iret pour donner la main ŕ une tâche non-privilégiée.
Quand une tâche utilisateur s'exécute et qu'une interruption survient, le processeur va automatiquement sauvegarder sur la pile noyau différents registres lui permettant de retourner dans le contexte utilisateur une fois le traitement de l'interruption terminé :

Une fois l'interruption traitée, l'instruction iret fait les choses suivantes :
- le processeur dépile les registres EIP et CS
- il vérifie si il y a un changement de privilčge
- il met ŕ jour les registres EIP et CS
- il dépile et met ŕ jour le registre EFLAGS
- en cas de changement de privilčge, il dépile et met ŕ jour les registres SS et ESP
Pour commuter en mode non-privilégié, il suffit donc de :
- empiler des registres SS et ESP qui pointent sur la pile utilisateur
- empiler un registre d'état eflags valide
- empiler des registres CS et EIP qui pointent vers le code utilisateur
- exécuter
iret.
Le code ci-dessous effectue un saut vers la fonction task1() en mode utilisateur :
push $0x33 \n \
push $0x30000 \n \
pushfl \n \
popl %%eax \n \
orl $0x200, %%eax \n \
and $0xffffbfff, %%eax \n \
push %%eax \n \
push $0x23 \n \
push $0x0 \n \
movl $0x20000, %0 \n \
movw $0x2B, %%ax \n \
movw %%ax, %%ds \n \
iret" : "=m" (default_tss.esp0) : );
Le code vu pas ŕ pas
On commence par désactiver les interruptions.
push $0x30000 \n \
Nous avons vu plus haut que le descripteur de segment de pile est ŕ l'offset 0x30 dans la GDT et qu'il définit un espace mémoire de 4k débutant ŕ l'adresse 0x20000. Le sommet de la pile est donc en 0x30000. On commence par placer le futur sélecteur et le futur pointeur de pile utilisateur sur la pile noyau.
Lors de l'appel ŕ iret, nous voulons que le processeur mette ŕ jour le segment de pile SS avec celui qui est ŕ l'index 0x30 de la GDT (la pile utilisateur). Mais nous voulons aussi que le processeur passe ŕ un niveau d'exécution différent (ici, moins privilégié). On indique ce niveau d'exécution au processeur en l'ajoutant dans le champ RPL (Requested Privilege Level) du sélecteur :
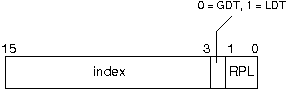
Dans notre exemple, nous voulons passer en mode utilisateur (valeur de privilčge 3, on parle aussi de passer en mode ring 3). Il faut donc utiliser le sélecteur 0x30 + 3 = 0x33 pour utiliser le segment de pile utilisateur en tant qu'utilisateur. Sans celŕ, le processeur va déclencher une exception de type General Protection fault.
popl %%eax \n \
orl $0x200, %%eax \n \
and $0xffffbfff, %%eax \n \
push %%eax \n \
On place le registre EFLAGS sur la pile en ayant pris soin de désactiver le bit Nested Task (NT) et en ayant activé le bit Interrupt Flag (IF).
push $0x0 \n \
On place sur la pile le sélecteur et le pointeur de code utilisateur. Comme avec le segment de pile, nous voulons que le processeur passe ŕ un niveau d'exécution différent, ici moins privilégié. On indique ce niveau de privilčge, ici 3, au processeur en l'ajoutant ŕ la valeur du sélecteur. Dans notre exemple, il faut donc utiliser le sélecteur 0x20 + 3 = 0x23 pour utiliser le segment de code utilisateur avec un niveau de privilčge de 3.
A ce stade lŕ, la pile est prčte pour basculer vers la tâche utilisateur.
Cette instruction met ŕ jour la valeur de default_tss.esp0, qui contient la valeur du pointeur de pile noyau utilisé par les interruptions pendant que la tâche utilisateur s'exécute.
movw %%ax, %%ds \n \
On initialise le sélecteur de segment de données en le faisant pointer sur le descripteur de la partie utilisateur. On applique la męme remarque que vu précedement avec les segments de code et de pile et on utilise donc le sélecteur 0x28 + 3 = 0x2B.
L'instruction iret est normalement utilisée pour retourner d'une interruption. Elle dépile l'adresse de retour (cs et eip), le registre eflags et les informations de pile (ss et esp).
On note que :
- Le bit NT du registre EFLAGS doit ętre désactivé pour éviter que le processeur fasse une commutation de tâche hardware.
- Le bit IF u registre EFLAGS doit ętre activé pour autoriser les interruptions une fois en mode utilisateur
Sauvegarder le contexte d'une tâche
Des interruptions qui sauvegardent la tâche en court
Quand le processeur est en mode utilisateur et qu'une interruption est reçue, il doit passer en mode privilégié pour exécuter l'ISR appropriée. En cas de changement de privilčge, le processeur fait automatiquement les choses suivantes :
- il récupčre dans le TSS les valeurs des champs
ss0etesp0correspondant aux registres SS et ESP de la pile noyau - il bascule sur la pile noyau et il empile dessus les registres SS, ESP, EFLAGS, CS et EIP liés ŕ la tâche utilisateur
- dans certains cas, il empile un code d'erreur
- il exécute l'ISR
Mais celŕ n'est pas suffisant. Pour sauvegarder entičrement le contexte d'exécution de la tâche utilisateur, il faut stocker quelque part, par exemple en les empilant sur la pile noyau, les autres registres du processeur susceptibles d'ętres modifiés par la routine d'interruption.
Pour illustrer ce point, ŕ l'origine notre handler pour l'interruption IRQ0 était :
call isr_clock_int
mov al,0x20
out 0x20,al
iret
Nous devons le modifier afin qu'il sauvegarde les registres (on remarque aussi qu'il initialise le sélecteur de segment de données DS afin que le noyau puisse accéder au segment de données) :
pushad
push ds
push es
push fs
push gs
push ebx
mov bx,0x10
mov ds,bx
pop ebx
%endmacro
%macro RESTORE_REGS 0
pop gs
pop fs
pop es
pop ds
popad
%endmacro
_asm_irq_0:
SAVE_REGS
call isr_clock_int
mov al,0x20
out 0x20,al
RESTORE_REGS
iret
Compiler et exécuter le noyau
La compilation n'apporte aucune surprise :
$ tar xfz kernel_MonoTask.tgz $ cd MonoTask $ make
En revanche, pour tester le nouveau noyau, il faut utiliser bochs en mode debug.
La fenętre ci-dessous montre ce qui se passe aprčs l'exécution de l'instruction iret. L'instruction d'aprčs est en mode utilisateur et adresse le bon segment de code. Un point est affiché toutes les 100 interruptions d'horloge, ce qui prouve que les interruptions fonctionnent correctement malgré le passage en mode utilisateur :

< Gérer les interruptions du clavier | TutoOS | Les appels systčmes >